
Mechatronics Engineering Department Participates in the 11th National Innovation Competition in Engineering (NICE 2026)!!!
The Mechatronics Engineering Department at Tishk International University proudly participated in the 11th National Innovation Competition in Engineering (NICE 2026), held on 17 May 2026. The annual competition brought together students, supervisors, jury members, and engineering innovators from universities across the Kurdistan Region and Iraq, providing a national platform for students to present practical solutions, creative prototypes, and advanced engineering systems.
NICE 2026 once again highlighted the importance of transforming theoretical knowledge into real-world applications. With engineering projects presented across several major categories, including Mechatronics Engineering, the event encouraged students to apply interdisciplinary skills in robotics, electronics, embedded systems, control, automation, artificial intelligence, and mechanical design.
The Mechatronics Engineering category featured a strong selection of student projects, demonstrating the department’s continued commitment to innovation, technical excellence, and hands-on engineering education. The projects reflected a wide range of modern engineering fields, from autonomous systems and robotic manipulation to assistive technology, sensor fusion, intelligent control, and sustainable transportation.
Among the participating projects, five outstanding projects were recognized as the leading projects in the Mechatronics Engineering category. The top three projects were awarded prizes for achieving first, second, and third place, while the fourth and fifth place projects were also highly recognized for their technical quality, innovation, and strong contribution to the competition.
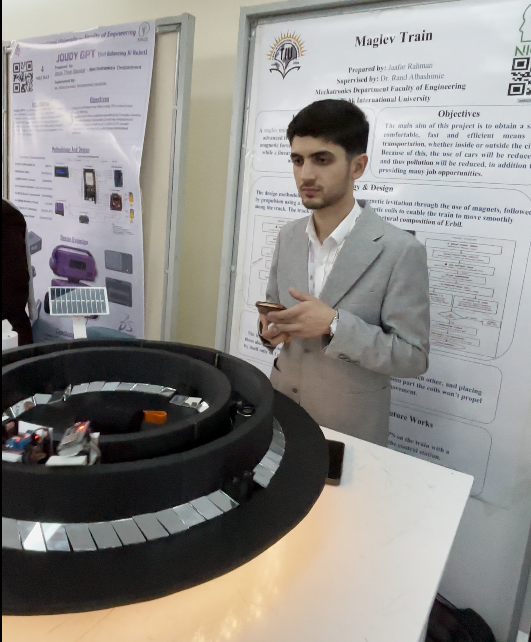
1st Place: Maglev Train
The Maglev Train project presented a prototype magnetic levitation transportation system designed to demonstrate frictionless movement using magnetic forces. The system uses magnets and electromagnetic components to levitate and propel the train along a track without direct physical contact.
By reducing mechanical friction, the project reflects one of the most promising concepts in modern transportation engineering. The prototype successfully demonstrated how magnetic levitation can contribute to smoother motion, reduced wear, improved efficiency, and advanced transport system design.
For achieving first place in the Mechatronics Engineering category, the Maglev Train team received a prize in recognition of their innovation, technical execution, and successful demonstration of magnetic levitation principles.
2nd Place: LidarCar
LidarCar addressed a significant challenge in autonomous driving: the ability to detect, learn, and respond to road surface irregularities such as potholes, bumps, and unsafe driving zones. Unlike traditional autonomous systems that primarily focus on avoiding dynamic obstacles such as vehicles and pedestrians, this project focused on improving ride comfort and mechanical safety by identifying static road anomalies.
The project integrated a monocular camera, LiDAR, and an IMU with a Raspberry Pi 5 through ROS 2 nodes. Using sensor fusion, the system combines visual, depth, and inertial data to create a more complete understanding of the road surface. The project also introduced a probabilistic grid map approach, allowing the vehicle to log road anomalies and build a localized confidence map of problematic driving zones.
This self-contained learning system allows a vehicle to adapt to its own daily routes without relying on cloud-based fleet learning, making it a practical and intelligent approach to autonomous road condition mapping.
For securing second place, the LidarCar team received a prize for their advanced system integration, strong research direction, and practical contribution to autonomous vehicle safety.

3rd Place: OctoMecha
OctoMecha is an automated colour-sorting robotic system that uses an ESP32-CAM with an OV2640 camera module to detect three different colours: red, green, and blue. Once the system identifies the colour of an object, servo motors move the robotic arm to collect and drop the object into the corresponding colour-matched box.
The project combines computer vision, embedded control, and robotic actuation into a compact automation system. OctoMecha demonstrates the practical application of visual recognition and sorting mechanisms commonly used in industrial automation, packaging, and smart manufacturing systems.
For achieving third place, the OctoMecha team received a prize in recognition of their successful implementation of colour detection, servo-based manipulation, and automated object sorting.

4th Place: RA6A Robotic Arm
RA6A is a six-degree-of-freedom articulated robotic arm with a fully 3D-printed PLA+ structural skeleton. The system is driven by closed-loop industrial stepper motors and controlled in real time using an STM32F439ZI microcontroller integrated with ROS 2 and MoveIt 2.
The project addresses a clear gap in the open-source robotics ecosystem. Many previous 3D-printed robotic arms have remained limited to simulation, relied on open-loop control without missed-step protection, or used hobby-grade servos that lack industrial reliability. RA6A combines additive manufacturing, closed-loop motor control, embedded real-time firmware, and modern motion-planning software into one integrated robotic platform.
One of the project’s most notable achievements is its cost efficiency. The system was developed at approximately one-twentieth of the cost of an equivalent commercial robotic arm, making advanced robotic manipulation more accessible for education, research, and prototyping.
Although RA6A did not place within the top three prize-winning positions, its strong technical depth, industrial relevance, and ambitious integration of mechanical design, embedded control, and motion planning made it one of the most impressive projects in the category.

(Probably the best project out of all of NICE 2026!)
5th Place: P.E.K.K.A – Vital Signs Monitoring System
P.E.K.K.A is a small interactive robot designed for users of all age groups. The robot uses various sensors to measure human vital signs while also interacting with users in a friendly and engaging manner.
The project combines robotics, sensing technology, and human-robot interaction, showing how mechatronic systems can support healthcare-related monitoring and user engagement. By integrating sensor-based measurement with interactive behaviour, P.E.K.K.A demonstrates the growing potential of assistive robotic systems in health awareness, education, and daily-life support.
While P.E.K.K.A did not receive one of the top three prizes, the project stood out for its human-centred design and its focus on applying mechatronics to health monitoring and interactive assistance. Its inclusion among the top five projects reflects the value of practical, socially beneficial engineering solutions.

Conclusion
The participation of the Mechatronics Engineering Department in NICE 2026 reflects the department’s dedication to project-based learning, multidisciplinary engineering practice, and student-led innovation. Through these projects, students demonstrated their ability to design, build, test, and present systems that respond to real engineering challenges across transportation, robotics, automation, autonomous vehicles, and healthcare support.
The department proudly congratulates the top three prize-winning teams for their outstanding achievements and well-earned recognition. At the same time, the department also extends its appreciation to the fourth and fifth place teams, whose projects displayed strong creativity, technical ambition, and meaningful engineering value.
All participating students and supervisors contributed to the success of the Mechatronics Engineering category at NICE 2026. Their work represents the spirit of innovation within the department and highlights the important role of young engineers in shaping the future of technology, automation, and intelligent systems.







